About Me
I'm
Nabil Miri, a motivated Robotics Engineer with a passion for developing innovative robotic systems through research and creative problem-solving. My expertise lies in
Model Predictive Control (MPC),
mobile robotics,
manipulators, and
deep learning, enabling me to design and optimize robotic solutions for real-world challenges.
During my time as a
Robotics Engineer Intern
at
BMW Group
in Munich, I had the opportunity to work on cutting-edge projects that automated complex tasks in robotics. I developed connectivity features using
Python,
ROS2, and
Docker, designed CI/CD pipelines, and integrated
Azure services
for seamless deployment across robot instances.
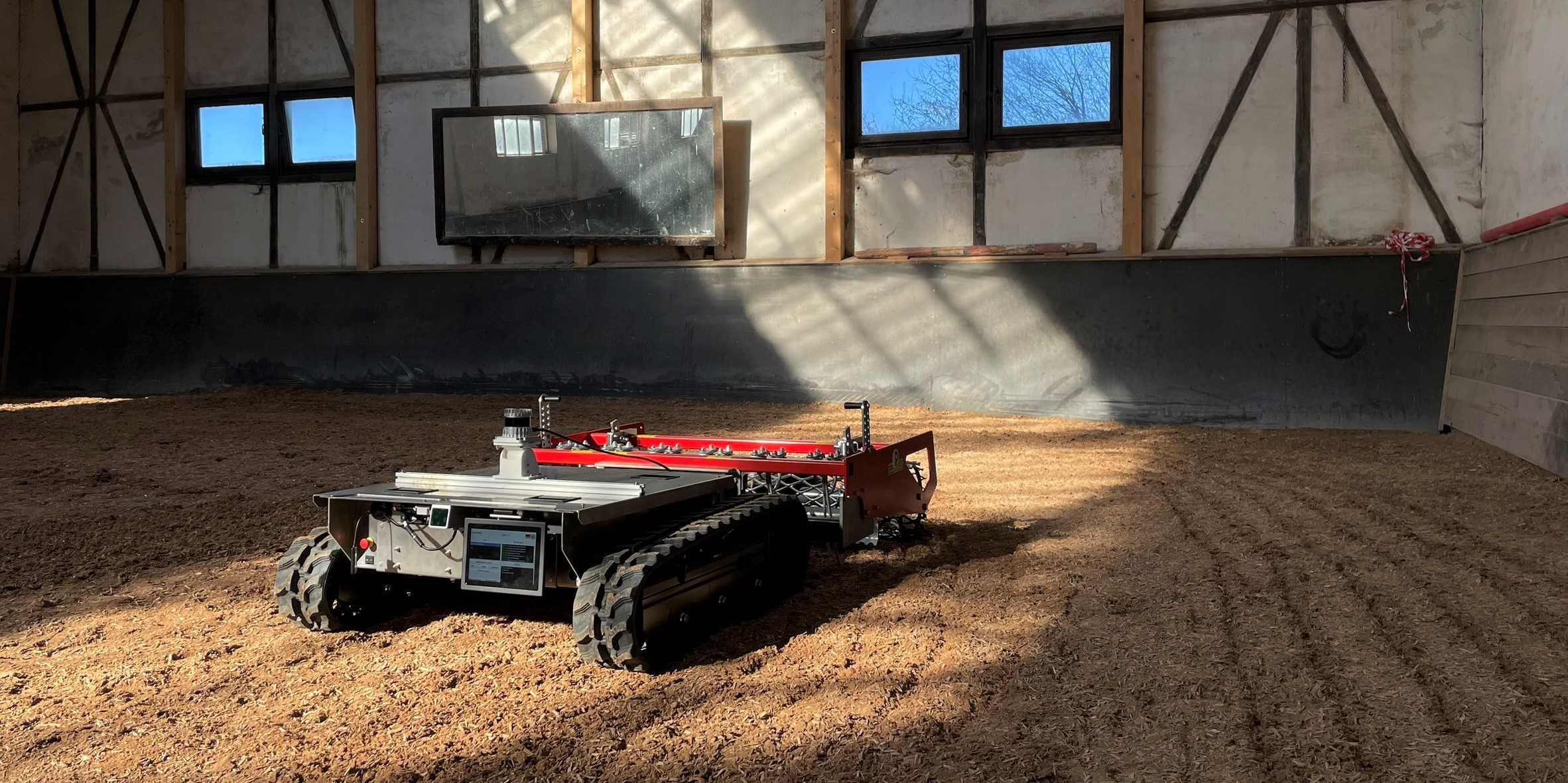
Recently, I worked on my Master's thesis at
Fraunhofer IPA, where I developed a
traversability-aware local MPC path planner
for outdoor agricultural mobile robots. This work focuses on optimizing robot movement in challenging environments, leveraging advanced control techniques to improve performance and efficiency.
I have had the privilege of publishing two papers in IEEE conferences during my bachelor's degree. These publications, along with my role as a student researcher in the Robotics Systems and Technologies (RST) Department at
TU Dortmund University, have provided me with a solid foundation in research, academic writing, and collaborative problem-solving.
I am committed to continuous learning and improvement, always striving to enhance my knowledge and skills. I thrive in collaborative environments where teamwork, communication, and dedication are essential to solving complex problems and advancing robotics technologies.
I'm passionate about leveraging my skills to develop innovative solutions that push the boundaries of robotics and intelligent systems.
Technical Skills
Robotics & Control
-
ROS2
-
MPC
-
Navigation
-
Localization
-
Path Planning
Machine Learning & Vision
-
Deep Learning
-
3D Computer Vision
-
TensorFlow
-
PyTorch
-
Segmentation
Cloud & DevOps
-
Azure
(Key Vault, Blob Storage, Table Storage).
-
Docker
-
CI/CD
-
Jira
-
Streamlit